Solving orbital equations with different algorithms
Contents
Solving orbital equations with different algorithms#
This notebook was adapted from Orbit_games.ipynb.
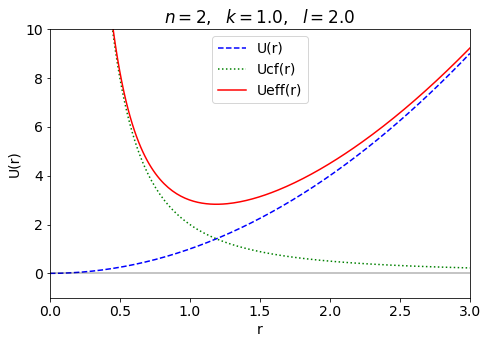
We consider energy plots and orbital solutions in polar coordinates for the general potential energy
\(\begin{align} U(r) = k r^n \end{align}\)
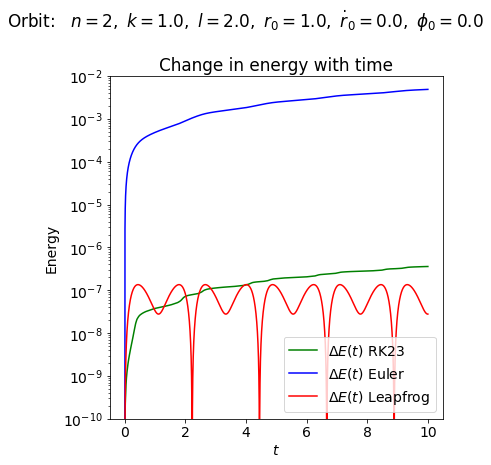
for different ODE solution algorithms. The solve_ivp function can itself be specified to use different solution methods (with the method keyword). Here we will set it by default to use ‘RK23’, which is a variant on the Runge-Kutta second-order algorithm. Second-order in this context means that the accuracy of a calculation will improve by a factor of \(10^2 = 100\) if \(\Delta t\) is reduced by a factor of ten.
We will compare it with the crudest algorithm, Euler’s method, which is first order, and a second-order algorithm called Leapfrog, which is designed to be precisely time-reversal invariant. This property guarantees conservation of energy, which is not true of the other algorithms we will consider.
To solve the differential equations for orbits, we have defined the \(\mathbf{y}\) and \(d\mathbf{y}/dt\) vectors as
\(\begin{align} \mathbf{y} = \left(\begin{array}{c} r(t) \\ \dot r(t) \\ \phi(t) \end{array} \right) \qquad \frac{d\mathbf{y}}{dt} = \left(\begin{array}{c} \dot r(t) \\ \ddot r(t) \\ \dot\phi(t) \end{array} \right) = \left(\begin{array}{c} \dot r(t) \\ -\frac{1}{\mu}\frac{dU_{\rm eff}(r)}{dr} \\ \frac{l}{\mu r^2} \end{array} \right) \end{align}\)
where we have substituted the differential equations for \(\ddot r\) and \(\dot\phi\).
Then Euler’s method can be written as a simple prescription to obtain \(\mathbf{y}_{i+1}\)
from \(\mathbf{y}_i\), where the subscripts label the elements of the t_pts array:
\(\mathbf{y}_{i+1} = \mathbf{y}_i + \left(d\mathbf{y}/dt\right)_i \Delta t\), or, by components:
\(\begin{align} r_{i+1} &= r_i + \frac{d\mathbf{y}_i[0]}{dt} \Delta t \\ \dot r_{i+1} &= \dot r_{i} + \frac{d\mathbf{y}_i[1]}{dt} \Delta t \\ \phi_{i+1} &= \phi_i + \frac{d\mathbf{y}_i[2]}{dt} \Delta t \end{align}\)
Look at the solve_ode_Euler method below and verify the algorithm is correctly implemented.
The leapfrog method does better by evaluating \(\dot r\) at a halfway time step before and after the \(r\) evaluation, which is both more accurate and incorporates time reversal:
\(\begin{align} \dot r_{i+1/2} &= \dot r_{i} + \frac{d\mathbf{y}_i[1]}{dt} \Delta t/2 \\ r_{i+1} &= r_i + \dot r_{i+1/2} \Delta t \\ \dot r_{i+1} &= \dot r_{i+1/2} + \frac{d\mathbf{y}_{i+1}[1]}{dt} \Delta t/2 \\ \phi_{i+1} &= \phi_i + \frac{d\mathbf{y}_i[2]}{dt} \Delta t \end{align}\)
Look at the solve_ode_Leapfrog method below and verify the algorithm is correctly implemented.
A third method is the second-order Runge-Kutta algorithm, which we invoke from solve_ivp as RK23.
It does not use a fixed time-step as in our “homemade” implementations, so there is not a direct
comparison, but we can still check if it conserves energy.
Run the notebook. You are to turn in and comment on the “Change in energy with time” plot at the end.
Where do you see energy conserved or not conserved? Show that Euler is first order and leapfrog is second
order by changing \(\Delta t\); describe what you did and what you found.
Try another potential to see if you get the same general conclusions.
import numpy as np
import matplotlib.pyplot as plt
from scipy.integrate import solve_ivp
# Change the common font size
font_size = 14
plt.rcParams.update({'font.size': font_size})
class Orbit:
"""
Potentials and associated differential equations for central force motion
with the potential U(r) = k r^n. Several algorithms for integration of
ordinary differential equations are now available.
"""
def __init__(self, ang_mom, n, k=1, mu=1):
self.ang_mom = ang_mom
self.n = n
self.k = k
self.mu = mu
def U(self, r):
"""Potential energy of the form U = kr^n."""
return self.k * r**self.n
def Ucf(self, r):
"""Centrifugal potential energy"""
return self.ang_mom**2 / (2. * self.mu * r**2)
def Ueff(self, r):
"""Effective potential energy"""
return self.U(r) + self.Ucf(r)
def U_deriv(self, r):
"""dU/dr"""
return self.n * self.k * r**(self.n - 1)
def Ucf_deriv(self, r):
"""dU_cf/dr"""
return -2. * self.ang_mom**2 / (2. * self.mu * r**3)
def Ueff_deriv(self, r):
"""dU_eff/dr"""
return self.U_deriv(r) + self.Ucf_deriv(r)
def dy_dt(self, t, y):
"""
This function returns the right-hand side of the diffeq:
[dr/dt d^2r/dt^2 dphi/dt]
Parameters
----------
t : float
time
y : float
3-component vector with y[0] = r(t), y[1] = dr/dt, y[2] = phi
"""
return [ y[1],
-1./self.mu * self.Ueff_deriv(y[0]),
self.ang_mom / (self.mu * y[0]**2) ]
def solve_ode(self, t_pts, r_0, r_dot_0, phi_0,
method='RK23',
abserr=1.0e-8, relerr=1.0e-8):
"""
Solve the ODE given initial conditions.
Use solve_ivp with the option of specifying the method.
Specify smaller abserr and relerr to get more precision.
"""
y = [r_0, r_dot_0, phi_0]
solution = solve_ivp(self.dy_dt, (t_pts[0], t_pts[-1]),
y, t_eval=t_pts, method=method,
atol=abserr, rtol=relerr)
r, r_dot, phi = solution.y
return r, r_dot, phi
def solve_ode_Euler(self, t_pts, r_0, r_dot_0, phi_0):
"""
Solve the ODE given initial conditions with the Euler method.
The accuracy is determined by the spacing of times in t_pts.
"""
delta_t = t_pts[1] - t_pts[0]
# initialize the arrays for r, rdot, phi with zeros
num_t_pts = len(t_pts) # length of the array t_pts
r = np.zeros(num_t_pts)
r_dot = np.zeros(num_t_pts)
phi = np.zeros(num_t_pts)
# initial conditions
r[0] = r_0
r_dot[0] = r_dot_0
phi[0] = phi_0
# step through the differential equation
for i in np.arange(num_t_pts - 1):
t = t_pts[i]
y = [r[i], r_dot[i], phi[i]]
r[i+1] = r[i] + self.dy_dt(t,y)[0] * delta_t
r_dot[i+1] = r_dot[i] + self.dy_dt(t,y)[1] * delta_t
phi[i+1] = phi[i] + self.dy_dt(t,y)[2] * delta_t
return r, r_dot, phi
def solve_ode_Leapfrog(self, t_pts, r_0, r_dot_0, phi_0):
"""
Solve the ODE given initial conditions with the Leapfrog method.
"""
delta_t = t_pts[1] - t_pts[0]
# initialize the arrays for r, rdot, r_dot_half, phi with zeros
num_t_pts = len(t_pts)
r = np.zeros(num_t_pts)
r_dot = np.zeros(num_t_pts)
r_dot_half = np.zeros(num_t_pts)
phi = np.zeros(num_t_pts)
# initial conditions
r[0] = r_0
r_dot[0] = r_dot_0
phi[0] = phi_0
# step through the differential equation
for i in np.arange(num_t_pts - 1):
t = t_pts[i]
y = [r[i], r_dot[i], phi[i]]
r_dot_half[i] = r_dot[i] + self.dy_dt(t, y)[1] * delta_t/2.
r[i+1] = r[i] + r_dot_half[i] * delta_t
y = [r[i+1], r_dot[i], phi[i]]
r_dot[i+1] = r_dot_half[i] + self.dy_dt(t, y)[1] * delta_t/2.
phi[i+1] = phi[i] + self.dy_dt(t,y)[2] * delta_t
return r, r_dot, phi
def energy(self, t_pts, r, r_dot):
"""Evaluate the energy as a function of time"""
return (self.mu/2.) * r_dot**2 + self.Ueff(r)
def start_stop_indices(t_pts, plot_start, plot_stop):
start_index = (np.fabs(t_pts-plot_start)).argmin() # index in t_pts array
stop_index = (np.fabs(t_pts-plot_stop)).argmin() # index in t_pts array
return start_index, stop_index
Pick a potential#
n = 2
k = 1.
ang_mom = 2.
o1 = Orbit(ang_mom, n=n, k=k, mu=1)
fig_2 = plt.figure(figsize=(7,5))
ax_2 = fig_2.add_subplot(1,1,1)
r_pts = np.linspace(0.001, 3., 200)
U_pts = o1.U(r_pts)
Ucf_pts = o1.Ucf(r_pts)
Ueff_pts = o1.Ueff(r_pts)
ax_2.plot(r_pts, U_pts, linestyle='dashed', color='blue', label='U(r)')
ax_2.plot(r_pts, Ucf_pts, linestyle='dotted', color='green', label='Ucf(r)')
ax_2.plot(r_pts, Ueff_pts, linestyle='solid', color='red', label='Ueff(r)')
ax_2.set_xlim(0., 3.)
ax_2.set_ylim(-1., 10.)
ax_2.set_xlabel('r')
ax_2.set_ylabel('U(r)')
ax_2.set_title(f'$n = {n},\ \ k = {k},\ \ l = {ang_mom}$')
ax_2.legend(loc='upper center')
ax_2.axhline(0., color='black', alpha=0.3)
fig_2.tight_layout()
fig_2.savefig('Gravitation_orbit_1.png')
Plot orbit and check energy conservation#
# Plotting time
t_start = 0.
t_end = 10.
delta_t = 0.001
t_pts = np.arange(t_start, t_end+delta_t, delta_t)
# Initial conditions
r_0 = 1. # 1.
r_dot_0 = 0.
phi_0 = 0.0
r_pts, r_dot_pts, phi_pts = o1.solve_ode(t_pts, r_0, r_dot_0, phi_0)
r_pts_Euler, r_dot_pts_Euler, phi_pts_Euler \
= o1.solve_ode_Euler(t_pts, r_0, r_dot_0, phi_0)
r_pts_LF, r_dot_pts_LF, phi_pts_LF \
= o1.solve_ode_Leapfrog(t_pts, r_0, r_dot_0, phi_0)
c = o1.ang_mom**2 / (np.abs(o1.k) * o1.mu)
epsilon = c / r_0 - 1.
energy_0 = o1.mu/2. * r_dot_0**2 + o1.Ueff(r_0)
print(f'energy = {energy_0:.2f}')
print(f'eccentricity = {epsilon:.2f}')
energy = 3.00
eccentricity = 3.00
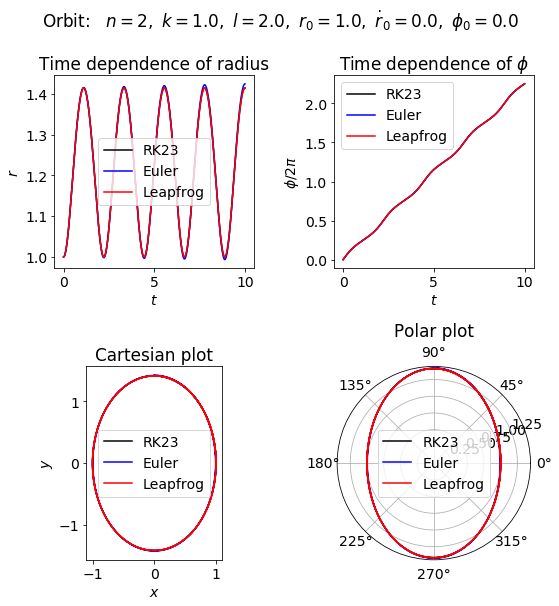
fig_4 = plt.figure(figsize=(8,8))
overall_title = 'Orbit: ' + \
rf' $n = {o1.n},$' + \
rf' $k = {o1.k:.1f},$' + \
rf' $l = {o1.ang_mom:.1f},$' + \
rf' $r_0 = {r_0:.1f},$' + \
rf' $\dot r_0 = {r_dot_0:.1f},$' + \
rf' $\phi_0 = {phi_0:.1f}$' + \
'\n' # \n means a new line (adds some space here)
fig_4.suptitle(overall_title, va='baseline')
ax_4a = fig_4.add_subplot(2,2,1)
ax_4a.plot(t_pts, r_pts, color='black', label='RK23')
ax_4a.plot(t_pts, r_pts_Euler, color='blue', label='Euler')
ax_4a.plot(t_pts, r_pts_LF, color='red', label='Leapfrog')
ax_4a.set_xlabel(r'$t$')
ax_4a.set_ylabel(r'$r$')
ax_4a.set_title('Time dependence of radius')
ax_4a.legend()
ax_4b = fig_4.add_subplot(2,2,2)
ax_4b.plot(t_pts, phi_pts/(2.*np.pi), color='black', label='RK23')
ax_4b.plot(t_pts, phi_pts_Euler/(2.*np.pi), color='blue', label='Euler')
ax_4b.plot(t_pts, phi_pts_LF/(2.*np.pi), color='red', label='Leapfrog')
ax_4b.set_xlabel(r'$t$')
ax_4b.set_ylabel(r'$\phi/2\pi$')
ax_4b.set_title(r'Time dependence of $\phi$')
ax_4b.legend()
ax_4c = fig_4.add_subplot(2,2,3)
ax_4c.plot(r_pts*np.cos(phi_pts), r_pts*np.sin(phi_pts),
color='black', label='RK23')
ax_4c.plot(r_pts_Euler*np.cos(phi_pts_Euler),
r_pts_Euler*np.sin(phi_pts_Euler),
color='blue', label='Euler')
ax_4c.plot(r_pts_LF*np.cos(phi_pts_LF),
r_pts_LF*np.sin(phi_pts_LF),
color='red', label='Leapfrog')
ax_4c.set_xlabel(r'$x$')
ax_4c.set_ylabel(r'$y$')
ax_4c.set_aspect('equal')
ax_4c.set_title('Cartesian plot')
ax_4c.legend()
ax_4d = fig_4.add_subplot(2,2,4, polar=True)
ax_4d.plot(phi_pts, r_pts, color='black', label='RK23')
ax_4d.plot(phi_pts_Euler, r_pts_Euler, color='blue', label='Euler')
ax_4d.plot(phi_pts_LF, r_pts_LF, color='red', label='Leapfrog')
ax_4d.set_title('Polar plot', pad=20.)
ax_4d.legend()
fig_4.tight_layout()
fig_4.savefig('Leapfrog_orbit_1.png', dpi=200, bbox_inches='tight')
E_tot_pts = o1.energy(t_pts, r_pts, r_dot_pts)
E_tot_0 = E_tot_pts[0]
E_tot_rel_pts = np.abs((E_tot_pts - E_tot_0)/E_tot_0)
E_tot_pts_Euler = o1.energy(t_pts, r_pts_Euler, r_dot_pts_Euler)
E_tot_0_Euler = E_tot_pts_Euler[0]
E_tot_rel_pts_Euler = np.abs((E_tot_pts_Euler - E_tot_0_Euler)/E_tot_0_Euler)
E_tot_pts_LF = o1.energy(t_pts, r_pts_LF, r_dot_pts_LF)
E_tot_0_LF = E_tot_pts_LF[0]
E_tot_rel_pts_LF = np.abs((E_tot_pts_LF - E_tot_0_LF)/E_tot_0_LF)
fig_5 = plt.figure(figsize=(6,6))
overall_title = 'Orbit: ' + \
rf' $n = {o1.n},$' + \
rf' $k = {o1.k:.1f},$' + \
rf' $l = {o1.ang_mom:.1f},$' + \
rf' $r_0 = {r_0:.1f},$' + \
rf' $\dot r_0 = {r_dot_0:.1f},$' + \
rf' $\phi_0 = {phi_0:.1f}$' + \
'\n' # \n means a new line (adds some space here)
fig_5.suptitle(overall_title, va='baseline')
ax_5a = fig_5.add_subplot(1,1,1)
#ax_5a.semilogy(t_pts, np.abs(E_tot_pts), color='black', label=r'$E(t)$')
ax_5a.semilogy(t_pts, E_tot_rel_pts,
color='green', label=r'$\Delta E(t)$ RK23')
ax_5a.semilogy(t_pts, E_tot_rel_pts_Euler,
color='blue', label=r'$\Delta E(t)$ Euler')
ax_5a.semilogy(t_pts, E_tot_rel_pts_LF,
color='red', label=r'$\Delta E(t)$ Leapfrog')
ax_5a.set_ylim(1.e-10, 1.e-2) # (1.e-12, 5)
ax_5a.set_xlabel(r'$t$')
ax_5a.set_ylabel(r'Energy')
ax_5a.set_title('Change in energy with time')
ax_5a.legend()
fig_5.tight_layout()
fig_5.savefig('Leapfrog_energy_test_1.png', dpi=200, bbox_inches='tight')